From a Highway Risk Monitoring Process to an Intelligent System for Highway Safety Calibration for Autonomous Vehicles


The arrival of autonomous vehicles is inevitable. Among their advantages is the reinforcement of road safety. Despite international road safety efforts, fatal accidents and major injuries are still statistically at unacceptable levels. Road safety programs are based on data processing for network scanning to address issues. Achieving a level of accuracy and confidence in existing practices remains a challenge. Considering autonomous vehicle capabilities, we propose a new approach for road safety management optimization. The solution is based on the combination of acquiring large amounts of temporal data and advanced processing in artificial intelligence and statistics. The research topics required to improve and optimize road safety management are identified in the context of the introduction of autonomous vehicles.
INTRODUCTION
Autonomous vehicles present the technology of Intelligent Transportation Systems (ITS) with the possibility of optimizing mobility and road safety in transport networks. Road safety issues remain one of the concerns of transport organizations and numerous researchers. Infrastructure management in relation to road safety is mainly based on identifying areas with a high risk of accidents.
Road safety programs use statistical techniques to measure the risk levels of transport network segments. The range of techniques and the differences between the criteria used highlight limits in terms of the accuracy of the results. Data completeness and accuracy are limited due to the technologies used.
We discuss in this paper the potential contributions of autonomous vehicles thanks to their hardware components and cognitive capacities.
This paper is structured as follows. In Section 2, we briefly introduce autonomous vehicles and their roles in road safety. Section 3 provides a brief overview of existing techniques for network scanning. Section 4 presents a new approach to road network scanning based on autonomous vehicles and an ITS integrated architecture. A conclusion and research topics for autonomous vehicles are presented in Section 5.
THE ROLE OF AUTONOMOUS VEHICLES IN ROAD SAFETY
Transportation network road safety still represents one of the major challenges despite recent technical advances. Statistics on the occurrence of accidents show three main causes: 1) human factors, 2) environment, including traffic and infrastructure, and 3) vehicles. A large percentage of accidents are directly related to human factors.1
Despite this reality, work on accidents rarely separates these categories, which are nevertheless highlighted by statistics. However, it is clear that in the absence of human factors, the likelihood of a decrease in accidents could be significant. The technology of autonomous vehicles enables this objective to be achieved thanks to their autonomous capacities, which do not always require driver intervention.
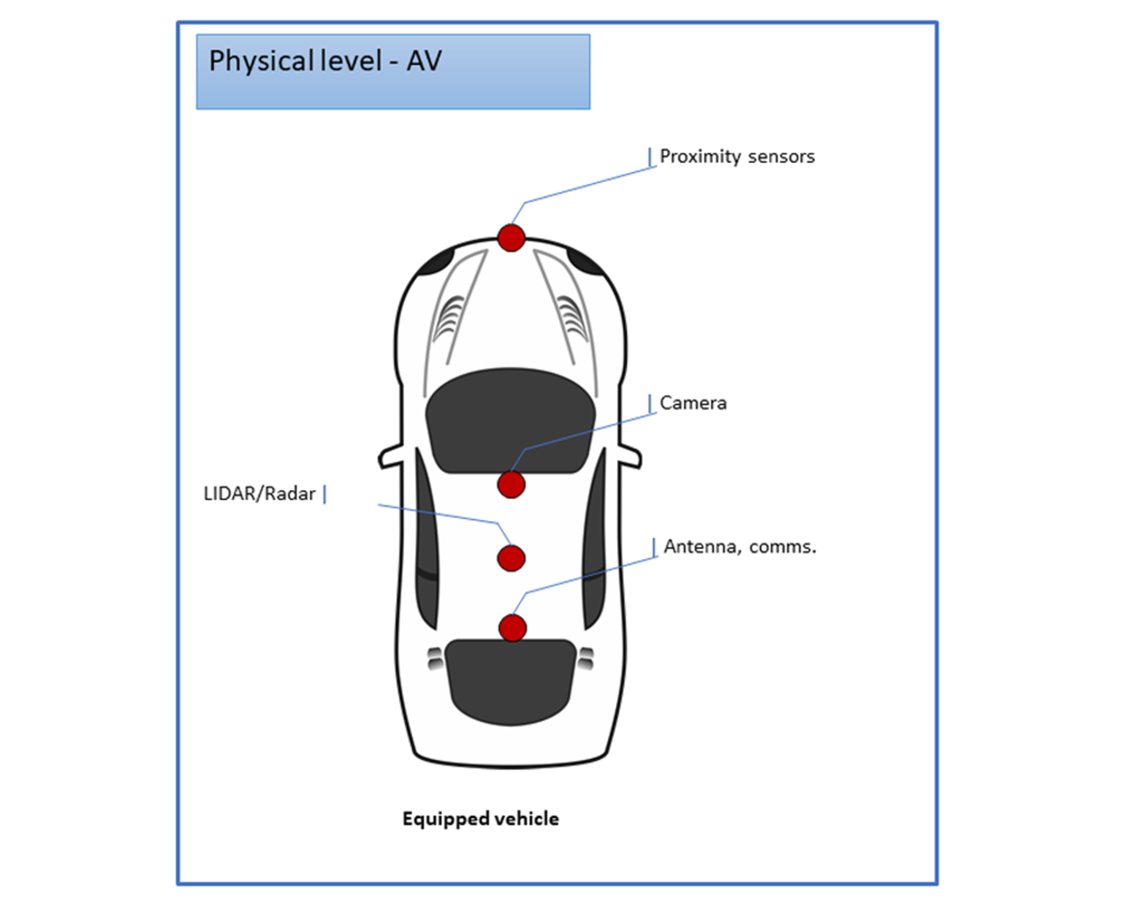
Autonomous vehicles (AV) are equipped with software and hardware components to have the required capacities for driving, which is one of the most complex functions to be automated. Advanced technologies for data acquisition, communications and processing must be integrated into the design and manufacturing of AVs. The hardware components illustrated in Figure 1 make it possible to collect various information to be processed according to a driving pattern (Figure 1 : Example of AV sensors and communication technologies).
Numerous road safety features are assumed by AVs, including collision avoidance and the collection of information relevant to predicting potential road accidents. Information communications inside a vehicle or between vehicles can trigger actions within a vehicle, such as braking or lane changes to avoid collisions. Vehicles can also share warnings to trigger driving actions to ensure road safety.
Sensors integrated into AVs enable them to collect real-time information on a continuous basis. The AV’s perception of its driving environment is thus optimal, which can be useful right away or for future risk estimations.
AN OVERVIEW OF HIGHWAY SAFETY MONITORING TECHNIQUES
There are two categories of transportation network segment monitoring for safety (highways and intersections). The first category involves a process of classifying segments according to accident prediction results using statistical models and based on historical accident data. The second category considers only geometric parameters related to the network design.2
Common statistical techniques are based on accident counts and rates, Poisson regression, negative binomial models, and the empirical Bayesian approach.3-6 Prediction models are still being studied to associate the best techniques with the criteria considered for classifying roads. The technique used in [7] is based on a regression analysis to associate the frequency of accidents with variables defined for road safety, such as traffic and speed. Other models are mentioned in the literature, such as the frequent pattern tree.8 The prediction rates of this model exceed 60% and are comparable with the usual model techniques. In [9], crash modification factor techniques are used. These techniques enable adjustments for some existing predictions. They are based on the empirical Bayes approach. The objective is to search for crash frequency. Prediction tools called Accident Prediction Models (APMs) are used by numerous practitioners to predict accidents in order to develop solutions and be able to measure their effects.10
Another variant between prediction models is regarding input variables. The main variables used are the Annual Average Daily Traffic (AADT),2,5 and the number of crashes per km.3 Nevertheless, some variables used in [2] are considered relevant, but they are absent from several existing practices. The latter mainly relates to the metrics of highway geometry with an impact on accident predictions. Other variables presented in [7], in addition to road geometry, are road regulations and road configurations (bike spaces, buses, etc.). Another category of variables that is considered in some works includes weather, visibility and even vehicle occupancy.8
Figure 2 illustrates some highway features that have a significant impact on the safety of transportation network segments. However, few variables are really considered in existing applications related to transportation network scanning.

Another aspect highlighted in the prediction models presented in the literature concerns the sources of data. Research papers and practices used to scan transport networks are often illustrated by case studies.3-5 In [7] the only data sources that are mentioned are related to municipal police reports. There is limited information on the sources of existing data. Other problems are related to the use of some data collected outside of road safety concerns, such as traffic data for the road network.10
Since the information concerning the technologies used to collect data is missing, it is difficult to validate the quality of the data used for prediction models, as well as the decisions resulting from this data processing. Another limitation of these studies is that the causes of the accidents presented in Section 2 are not considered in the analyses and prediction models. Other questions remain open regarding prediction models allowing segments to be classified since they are tested with different variables.
NEW APPROACH FOR A TRANSPORTATION NETWORK SCAN BASED ON AV CAPACITIES
As presented in Section 3, it is difficult, if not impossible, for some practices to optimize the scanning results due to important variables and characteristics missing, despite their importance for a realistic view of network segments with regards to safety.
We present here a global architecture for an intelligent system for network scanning considering autonomous vehicle operations. The approach is based on the capacities of the autonomous vehicles presented in Figure 1. The hardware components can participate in collecting the necessary information for risk evaluation. Sensor technologies, such as LIDAR, can capture information over time, and sometimes in real time, such as the narrowing of some regions due to the accumulation of snow or the presence of obstacles that can affect the safety measurement characteristics temporally. Figure 3 illustrates the architecture of the proposed system.

The new approach allows associations to be made between accident history data and information on the infrastructure environment, integrating both traffic data and geometric parameters, including objects with road safety consequences. The intelligent system for road network safety management consists of two component categories illustrated in Figure 4.

1. Statistic components: This component category is made up of prediction models similar to those presented in Section 3. A mechanism of dynamic configuration will enable the most appropriate model to be selected for specific prediction validation measures.
2. AI components: Are based on a library of artificial intelligence (AI) techniques. Several techniques will be defined at a generic system architecture level. In particular, we define a similar technique that will be useful for highways that do not have enough data to validate the results of the statistical models. An AI technique presented by reinforcement learning will be used for statistical parameters, adjusting especially those based on expert judgments, such as the thresholds for highway segment severity levels. Another AI technique will be considered to adjust the decision-making model of autonomous vehicles. The behaviour of autonomous vehicles must evolve according to the experiences and new situations to be faced. This component is useful to process accident data according to the categories presented in Section 2.
CONCLUSIOM AND FUTURE RESEARCH TOPICS
This paper highlights the limitations of the techniques used to measure the risks of transport network segments. More particularly, access to complete and accurate data considering the network parameters evolution remains an open problem.
Potential benefits of autonomous vehicles are presented in relation to the technologies they incorporate. Architecture for an intelligent risk management system for transport network segments is proposed. The combination of statistical techniques and artificial intelligence advanced processing provides answers to the points raised in this paper. Nevertheless, several research directions will be developed in the context of autonomous vehicle operations in transportation networks. Examples of research topics required in this context and involved in transport network road safety are new traffic patterns, AI techniques for autonomous vehicle behaviour adaptations following new situations related to road safety, and the new characteristics of infrastructure geometry given the new mobility models of autonomous vehicles. Finally, research activities on vehicular communications make it possible to optimize their capacities to react in real time and avoid collisions.
REFERENCE
[1] Transport Canada: https://www.tc.gc.ca/eng/motorvehiclesafety/tp-tp15145-1201.htm.
[2] S. Cafiso, G. La Cava, A. Montella. Safety Index for Evaluation of Two-Lane Rural Highways. Transportation Research Record, Journal of Transportation Research Board, Vol. 2019, 2007, pp. 136-145.
[3] L. Thakali, L. Fu and T. Chen. Comparing Crash Estimation Techniques for Ranking of Sites in a Network Screening Process, TRA-946-1, Annual Conference of Canadian Society for Civil Engineering, Resilient Infrastructure, London, 2016, p. 12. (http://www.wfeo.org/events/csce-2016-resilient-infrastructure/)
[4] H. Farah, A. Polus and M. Cohen. Multivariate Analyses for Infrastructure-based Crash-prediction Models for Rural Highways. Road & Transport Research: A Journal of Australian and New Zealand Research and Practice, Vol. 16, No. 4, 2007, pp. 26-41.
[5] MTMDE (Ministère des Transports et de la Mobilité durable et de l’électrification des transports), Québec. Plan d’intervention de sécurité routière en milieu municipal, Guide méthodologique d’élaboration, Mai 2016, p. 38.
[6] M. Marleau and E. Hildebrand. Collision Prediction for Two Lane Rural Roads Using IHSDM: A Canadian Experience, Proceedings of the 20th Canadian Multidisciplinary Road Safety Conference, Niagara Falls, Ontario, June 6-9, 2010, p. 14.
[7] P. Greibe. Accident Prediction Models for Urban Roads. Accident Analysis & Prevention, Vol. 35, No. 2, 2003, pp 273-285.
[8] L. Lei, Q. Wang, and A. W. Sadek. A Novel Variable Selection Method Based on Frequent Pattern Tree for Real-Time Traffic Accident Risk Prediction. Transportation Research Part C: Emerging Technologies, Vol. 55, 2015, pp. 444-459.
[9] L. Sasidharana, and E. T. Donnell. Propensity Scores-potential Outcomes Framework to Incorporate Severity Probabilities in the Highway Safety Manual Crash Prediction Algorithm. Accident Analysis & Prevention, Vol. 71, 2014, pp. 183–193.
[10] G. Yannis et al. Use of Accident Prediction Models in Road Safety Management – An International Inquiry. Transportation Research Procedia 14, 2016, pp. 4257-4266.