Evolving Services with Autonomous Mobility of Goods

What services could develop with a transition to autonomous transport of goods in cities
1 Abstract
The Austrian project, MULE (FFG, 2014), co-financed by the Austrian Research Funding Association, FFG, explores Multi-functional self-driving Urban Logistics platforms with Electric propulsion for urban areas (M.U.L.E.s). Within the framework of this project, the consortium is developing scenarios for the implementation of the so-called M.U.L.E.s covering the transportation of standardized transport items. Figure 1 depicts the basic idea. The moving pick-up station lined up in the background had been patented by Google before, under US patent 9,256,852 B1 (Triangle, 2015), but it was not known/disclosed at the time their own intellectual property proposal was written and presented, so it had been handed in for protection by the author (Cebrat, Automatische Ladevorrichtung mit mindestens einem längs verfahrbaren Roboterarm zur Stromversorgung von sich langsam bewegenden Fahrzeugen , 2016).
Research on self-driving logistics platforms leads to a couple of information and management prerequisites for automated cargo transport, which could result in the development of external services. This article lists the services and describes the context and feasibility for their creation. However, further research is still needed parallel to the evolving introduction of autonomous vehicles.
2 Introduction
Internet sales are constantly increasing, causing a higher need for express deliveries. This in turn increases people’s exposure to traffic, particularly in cities (DHL, 2014). With regards to the discussion on whether self-driving cars or the virtualization of car ownership will solve the problem or escalate it even further (Fernenstein, 2015) (ITF, 2015), the MULE project focuses on developing a roadmap for clean and resource-efficient delivery of goods in urban areas. In this context, services could be used to make automated (SAE level 4, restricted to certain routes) or autonomous (SAE level 5, with choice of route) transport of goods cheaper or more socially acceptable. The quality of the driving automats and the information they use will largely influence whether self-driving vehicles are considered acceptable (Fiegermann, 2015). This article develops a framework that covers data provisions for all of the known self-driving vehicle needs, but excludes services such as ethical training of driving automats or decision support systems in the cloud for driving automats in need.
3 Description of Services
3.1 Data for automated driving
Currently, there are two models being discussed for automated driving data provision. One model sees public entities providing data on public areas, streets, traffic lights, pedestrian crossings, etc. The other model foresees this role for private entities, such as service providers. Since precise data is necessary for navigation, this service may generate a higher turnover, attracting private capital. The economic problem is that the data has to be usable from the start, even if there are very few subscribers at the beginning. Given the fact that OEMs have bought data providers (Albanesius, 2013), this data would be used by them on an exclusive basis, creating a competitive advantage. Uber has reserved 500 Mio. USD for generating this data on a world-wide level, but will use Baidu’s map data in China (Abhishek, 2016). Cities on the other hand, could provide information about changes in road infrastructure, road works and cityscapes to be enhanced by live data coverage that is redistributed to other vehicle controllers. Dynamic data - like the status of traffic lights, closures, temporary speed limits, etc. - are discussed in the section “Managing restrictions for driverless vehicles” in this article.
3.2 Remote control of stranded vehicles
Road closures or defective sensors could cause issues for automatic operation, or autonomous operation might be too dangerous. Remote control was not regarded as wanted or feasible when experts in WP200 of the MULE project were consulted. Regardless, the idea of manually unlocking stranded vehicles seems to be one way of dealing with the limited capabilities of autonomous driving controllers. For remote control, safe and high bandwidth data communication is necessary. With the increasing maturity of driving automats, remote control may vanish or it may become a service provided by OEMs and be implemented from the start. As we see with current electrically-driven vehicles, telemetry could form the basis for controlling driving automats remotely by consolidating the rules they have learned, applying them to new cases and distributing them to the rest of the fleet. This ex-ante measure could reduce human involvement in controlling automats remotely for those cases where a new problem occurs and the existing set of sensors and algorithms may not be certain how to handle the situation.
3.3 Managing shared transport platforms
Given that transport vehicles are often used by shipping or logistics companies who do not necessarily own them, managing available slots becomes vital. Self-driving logistics platforms, including those used for predictive relocation may become an essential part of the Internet of Things. Existing players, such as Uber, are currently experimenting with the idea of using citizens’ cars to transport parcels (Andel, 2014), however this could increase road traffic if the average load factor is decreasing leading to congestion and increase in energy demand. The service required for ordering and managing transport vehicles could also include managing self-driving mini-buses.
3.4 Managing restrictions for (driverless) vehicles
With a self-driving vehicle system, it is imperative that all vehicles obey the legal restrictions. In the case of human drivers, hidden traffic signs can often be missed. For machines, there are two options: image recognition and geographical information systems. Certain areas may also indicate zones with special speed limits, one-way streets, parking restrictions, etc. This dynamic data could be distributed to all kinds of vehicles, not just self-driving ones supporting compliance via assisting systems.
3.5 Collecting parking fees
Once driverless vehicles are on the road, remote payment services will also be needed to address parking fees and fines. This will not be an issue for delivery vehicles as they do not use public parking. However, autonomous cargo platforms - as intended in the project proposal - could use parking lots to wait (creating a free buffer in logistics) and recharge at the same time, which could incur additional fees. Vehicle operators could be charged directly if they have a means of authentication. For this to happen, an automated charging infrastructure would be necessary. This may be easier to implement with electric vehicles as opposed to gasoline or diesel-fueled vehicles.
3.6 Enforcing traffic laws (excluding civil and criminal sanctions)
While on the one hand, using precise data could improve how well self-driving cars respect the traffic laws indicated on traffic signs and/or road markings, there is always a possibility that a transmission error could occur or be ignored deliberately by algorithms weighing in transport time. It may therefore be necessary to levy fines. Public entities may outsource this functionality to private companies who are specialized in the area of electronic or mobile payments. However, if driving automats are going to be licensed by certified bodies for complying with traffic laws and cannot be overruled in operation, no such service will be needed.
3.7 Access control for driverless vehicles
When driverless vehicles enter private areas of business, they may need access to restricted areas. Although this could be managed on a case-to-case basis, security service providers could include that in their service offer, since additional checks may be needed before access is granted.
All service providers handling private data are subject to privacy control, so no face recognition technology will be used. For most services, data availability is the most crucial element (data provision for navigation, choice of route, etc.). Secure transactions are also needed for services collecting fees or documenting traffic violations. Road rage is now seen as a new challenge for regulation (Jaffe, 2014), especially if injuries are to be considered. In this case, remote shut off capabilities for self-driving vehicles would be needed, as it might be more environmentally friendly than microwave cannons.
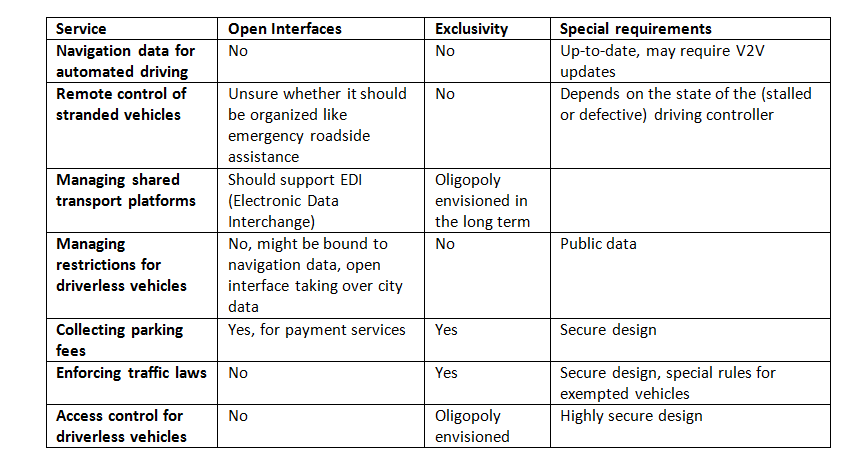
Table 1 outlines the need for open interfaces, indicates the service’s level of exclusivity and describes any special requirements.
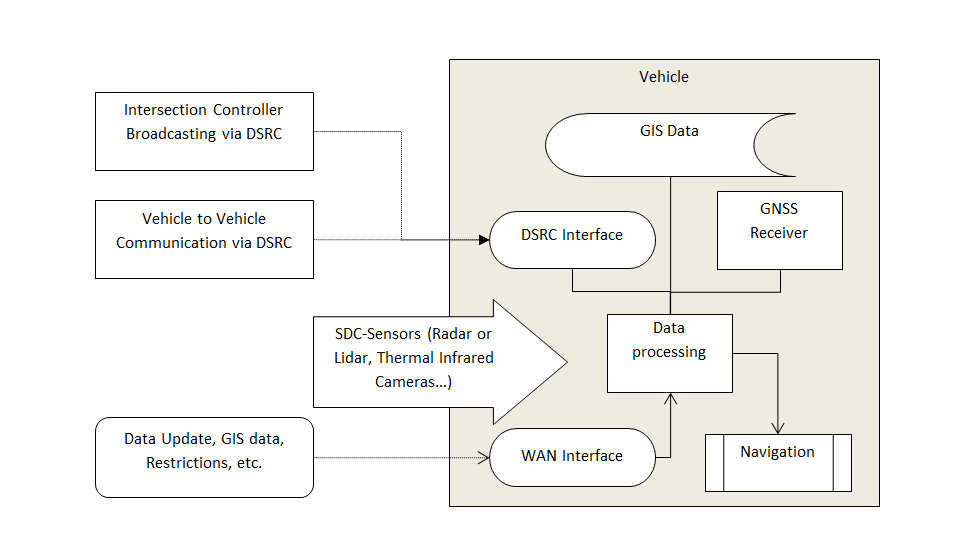
4 System architecture
The following scheme for the system architecture originated from tactical control of serial hybrid power trains, so fuel efficiency benefits may be enjoyed when using the services as well.
The Wide Area Network (WAN) is used for updating navigation and geofencing data. GNSS may use GPS or Galileo, which could be more beneficial with evolving SDC, once it is fully operational in 2020 (ESA, 2015), compared to the status quo. Communication technology may vary. So far, Dedicated Short Range Communication (DSRC) may be used for transmitting traffic light data, which can also be shared through Vehicle to Vehicle (V2V) Communication. 4G LTE-advanced technology may also be used to better manage congestion on the baseband (GSM Association, 2014) and compatibility with 5G technologies. Apart from being useful for navigation, the information could also be used for tactical energy management, enriched with (wireless) recharging management during vehicle unloading or waiting.
5 Analysis (Dependencies and Outlook)
In the event of a transition to shared self-driving vehicles, the number of parking lots needed for private vehicles would decrease. This could free up space for waiting areas or recharging stations, adding an additional service for managing that. Pick-up stations could also emerge, using unneeded parking lots. In this scenario, long-term pay parking lots would not need to be managed to the same extent. But as business models do not allow for low vehicle utilisation, vehicle costs would need to be incurred (through sensor costs and the allocation of development costs) ensuring efficient usage of the space. During peak hours, a shortage of parking lots with recharging stations could lead to predictive vehicle relocation. This could cause more traffic if the utilisation rate of those vehicles is low.
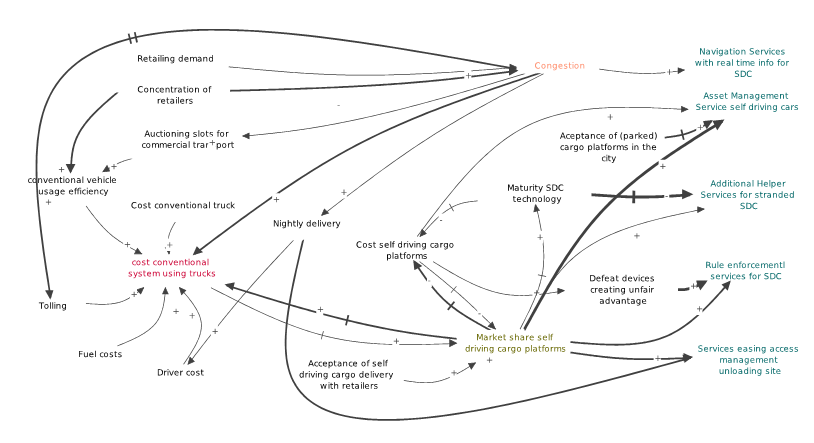
Figure 2 represents an analysis of the influences that the implementation and growth of these services could have. The market share for self-driving vehicles undoubtedly has a big influence, as does the fate of the market for conventional vehicles. This is a self-enforcing process, driven by technological progress with sensors. However, it is not clear if the cost of developing testing, licensing, etc. will be taken on by each OEM, thereby slowing down transition, or if it will be shared. Traffic congestion could indirectly lead to cost increases with the current system, shifting delivery to the nighttime, where driverless transport is cheaper in comparison, but transition costs will rise due to the need for automated unloading of goods.
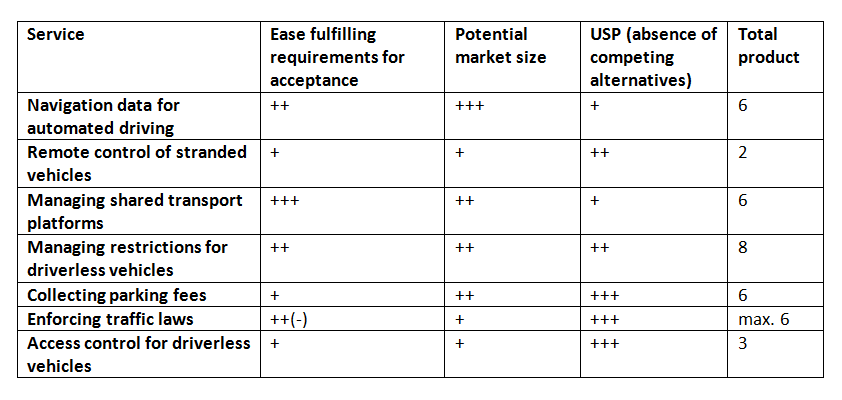
Table 2 shows a ranking of the potential services, consisting of a multiplication of qualified guesses for three indicators.
While remote control and access control might be minor markets, all other services could have a brighter future. Managing restrictions for driverless vehicles might be tendered to one single company per city, but vehicle interoperability has to be secured. This service could also work in collaboration with insurance companies, working towards limiting the costs incurred for liabilities due to accidents. This service may not be that appealing if low quality leads to higher insurance costs for service operators. However, the risk might be smaller for providers of navigation data. With regards to vehicle-to-vehicle data transmission, giving an unfair advantage to followers should be penalized, but enforcement scenarios are not yet in discussion, as for most of the scenarios presented here, navigation data is exempt.
6 Summary
A short analysis has shown that self-driving vehicles, both for personal use and transporting freight have the potential to create a multitude of services. Some of these services are similar to public services, but even if they are competing services, they should grant open access to all vehicles. Other services, like navigation data providers, could be an asset for OEMs, as only their vehicles will be able to gain access. Further discussion is needed on whether driving automats will need licences and whether that requirement is enforceable, so software programming for violating rules for their own benefit may not be used. In conclusion, the analysis has shown that new types of services may develop and managing transport systems will depend on the evolution of vehicle prices and the restrictions and costs of running cargo vehicles for commercial transport in cities.